领先的多模态 AI 技术
铸造线下空间数字化底座

Full View
技术全景
计算机视觉
- 物体检测/追踪/识别
- 图像/视频分割
- 用户行为检测
- 室内定位/追踪
- 三维重建
- 增强现实
机器人
- 自定位
- 环境感知
- 路径规划
- 自然交互界面
大数据分析
- 用户画像
- 推荐算法
- 大数据预测
- 异构与并行计算
语音识别
- 语音识别
- 语音合成
- 声纹识别
自然语言理解
- 多轮语音交互
- 阅读理解
- 文本挖掘




计算机视觉
机器人
大数据分析
语音识别
自然语言理解
Technology
技术亮点
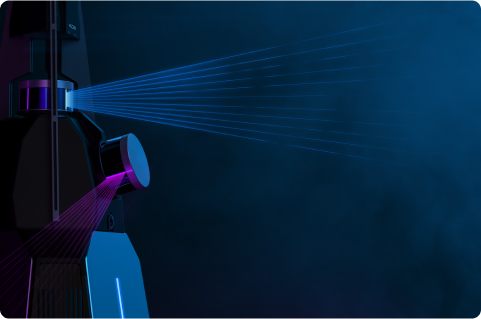
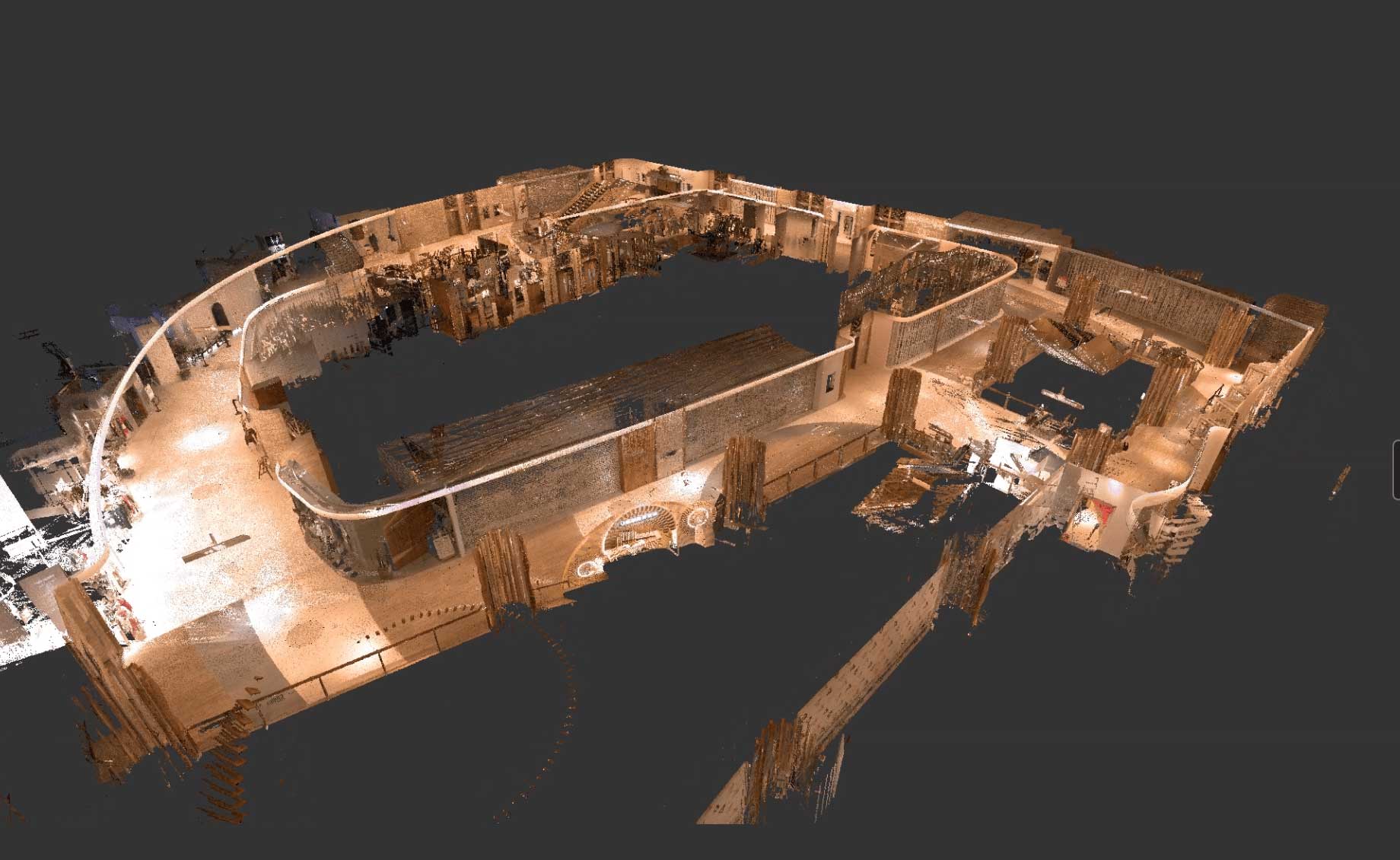
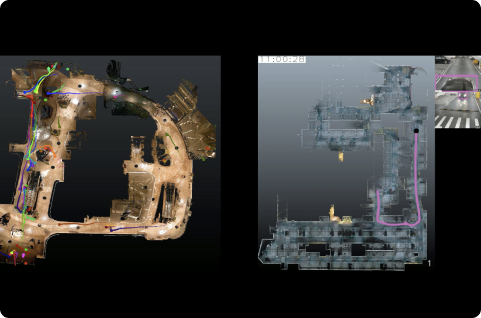
室内实景 3D 地图机器人
搭载激光雷达、IMU、工业相机、全景相机等多传感器,通过融合SLAM算法,实现超大规模场景的自动、高效、稳定产出厘米级稠密点云与场景模型,在市场上首个将室内实景
3D 地图成本迅速降至过去的1/10。
- · 超大面积室内场景高效重建(10万平)
- · 采集效率高、交付周期短(10万平只需约1-2天)
- · 精度高(厘米级)、稳定性高
高质量视频流去人影算法
结合传统图像处理、智能目标检测、帧间融合等技术,完成高质量视频自动去人影功能。
- · 比传统方案,数据处理效率更高、去人影效果更符合视觉观看要求
- · 算法的推广及应用,能够将传统 VR 产品生产效率提升一个量级
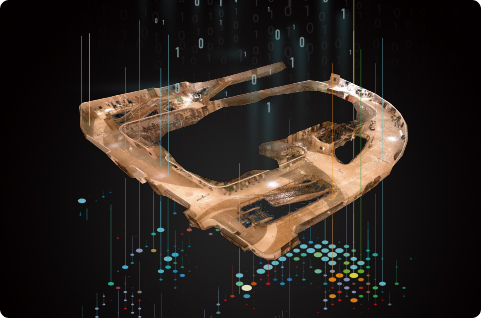
视觉地图重建及视觉定位算法
基于多传感器的室内视觉地图重建
基于自有硬件平台,可通过室内实景 3D
地图机器人一次性完成数据采集,在服务器上生成用于视觉定位的稀疏视觉高精地图。
- · 支持超大面积室内场景的重建(10万平)
- · 采集效率高,交付周期短
- · 重建稳定性高
端上视觉定位算法
基于手机端的图像及预先生成的稀疏视觉高精地图,解算手机设备的
6DOF pose,融合端上VIO,提供高帧率的6DOF定位
- · 设备支持范围广
- · 定位准确度高
- · 支持 Android、iOS、H5、小程序等多平台多渠道发布
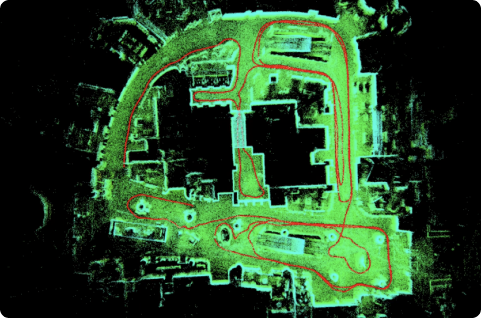
多传感器融合定位系统
基于 iBeacon、PDR、地磁、语义地图、手机端 SLAM
等多传感器融合定位,自研出了一套精度高、稳定性强,支持市面各种主流机型、小程序/APP多端支持的多模态融合自定位系统。
- · 定位精度高
- · 定位稳定性强
- · 小程序/APP多端支持
楼层/区域自识别
基于无线信号对场景进行建模,在业内首个实现不同楼层/区域的自动识别,导航导览中可实现楼层/区域自主切换。
- · 识别精度高
- · 可靠性强
- · 判断速度快
室内外无缝定位
基于 GPS,iBeacon, PDR,
地磁,语义地图的室内外一体定位技术,可实现园区、广场、室内环境间的无缝切换,连续定位。
- · 定位精度高
- · 定位稳定性强
- · 应用场景广泛,扩展性强
蓝牙5.1
自研基于阵列天线实现 AOA
到达角定位本方案,革命性地将传统低精度蓝牙5米精度提升十倍,获得稳定的0.5级米精度;基站通过蓝牙5.1阵列天线切换,向下兼容所有蓝牙4.2标签,同时实现IOT标签高精度定位以及LBS手机定位。
- · 定位精度高
- · 向下兼容蓝牙4.2标签
- · 定位标签容量大(单基站1000+),形态丰富,可定制化
- · 双基站可以实现三维定位,单基站可以实现二维定位
人、车、货等多目标动态感知技术
在室内实景 3D
地图的基础上,能够实现包括人、车、货在内的万+级多目标动态感知,帮助线下空间首次实现全场景、全流程、全量的数字化。以车的数字化为力,基于车辆跨镜动态追踪、车位车道全面感知,可全程精准把握车辆从入场到离场的连续动线。
Academic Award
学术奖项